简单介绍本组VisDrone2019比赛Object Detection in Images任务所采用的算法方法。
Introduction
RRNet
本次比赛提出并采用的网络框架为——RRNet,主要思想为将单阶段anchor-free算法(CenterNet)通过再次回归变为二阶段算法,通过再回归的方式让本就较精确的bbox更加精准。下图为网络框架图:
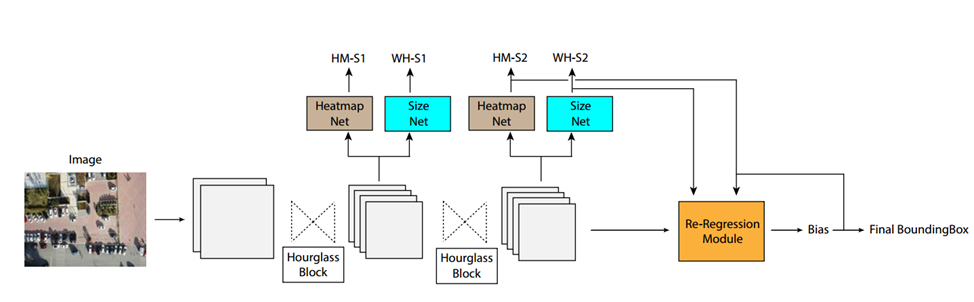
网络主体为CenterNet,backbone为hourglass-104,两个hourglass block的输出全部参与分类及回归,Heatmap代表中心点的激活图,Size代表中心点所对应object长宽的激活图,输出的一共4个map分别进行focal loss和l1 loss的计算。此上为CenterNet的主要部分,接下来我们继续利用其输出的特征图,送入后面的Re-Regression Module进行二次回归。Re-Regression Module内部结构如下:
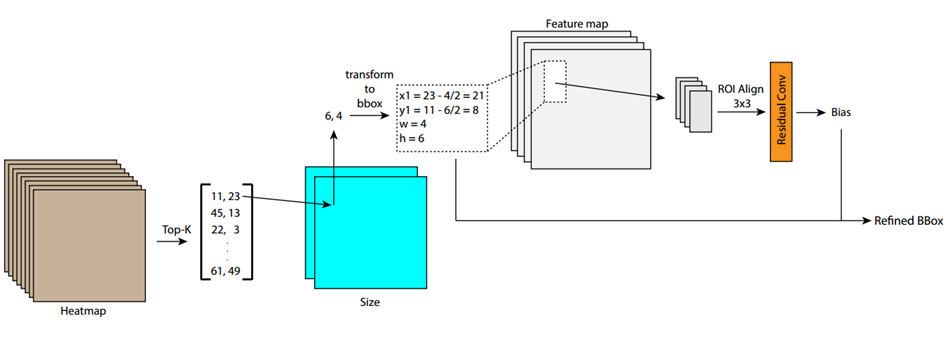
通过CenterNet生成的Heatmap以及SIzemap,我们可以直接将其转换成为bbox,得到bbox之后(我们可以将其类比为faster-rcnn中RPN网络生成的候选框),我们将这些候选区域送入ROI Align,进行再一次回归得到偏移量,将此偏移量加到原始bbox上的到修正后的输出。
Major features
除了再回归网络,我们还采用了以下一些方法让性能进一步提升:
| method | mAP |
|---|---|
| 1.two-stage/multi-stage | ↑2% |
| 2.wh conv | ↑0.3% |
| 3.re-sample | ↑1% |
| 4.multiscale training/test | ↑2% |
| 5.sync training | ↑1% |
| 6.nms/soft nms | ↑1% |
| 7.KL-Loss | (↑1%?) |
| 8.warm up lr | - |
| 9.mix up | - |
| 10.ellipse gaussian | - |
Details
1.two-stage/multi-stage
two-stage便指再回归思想,对于进行多次回归(multi-stage)我们目前还没有进行实验。这个再回归让mAP提高了2%
2.wh conv
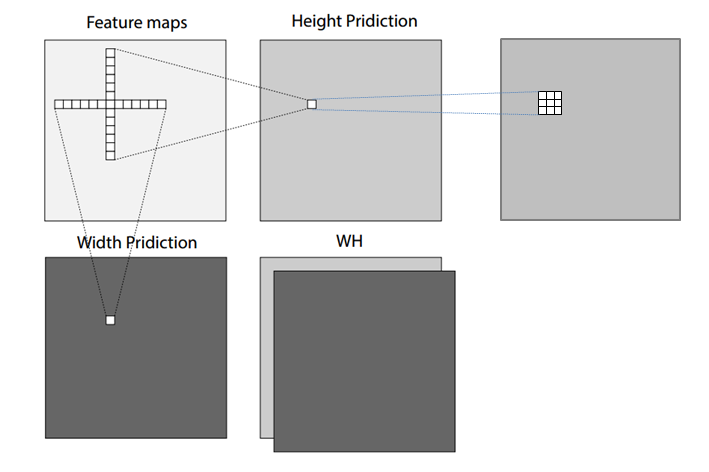
对于CenterNet中SIzemap的回归是单纯使用3x3卷积,我们认为这种卷积核并不能get到整个object的全部信息,从而以这种方式推理出object的长与宽是不合理的,于是我们采用1xk,kx1的卷积核分别推理object的宽和长,这样可能会获得更多有效信息。 此方法提升了0.3%的mAP。
3.Data Augmentation
简单介绍一下数据增强方面所采用的一些方法
re-sample
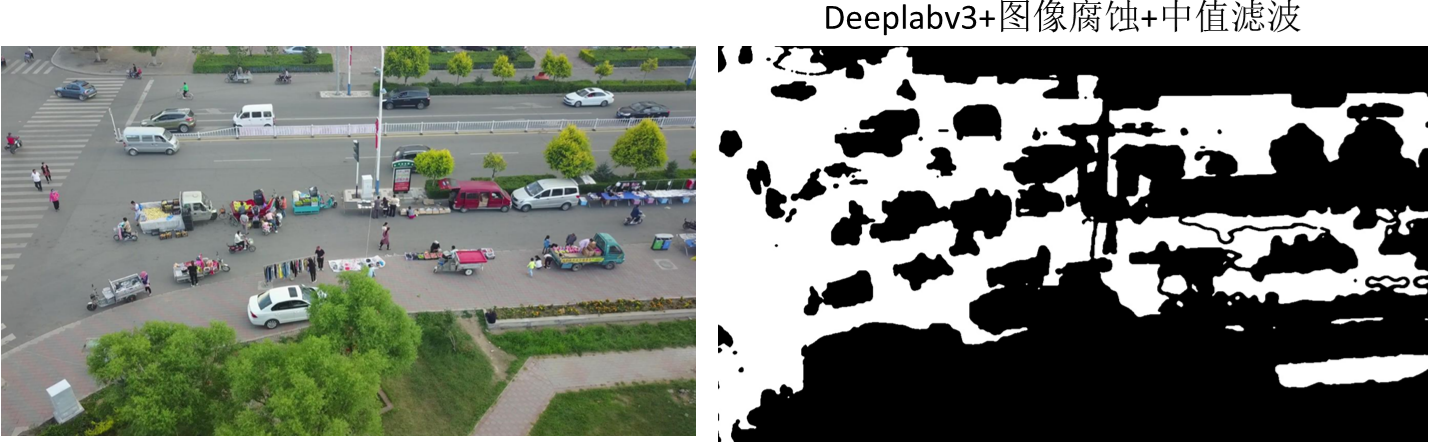
我们发现对于people,pedestrian等小目标的类准确率非常低,于是采用了将hard-sample再次采样(复制)放到图上进行训练的方式。考虑到背景信息,我们首先使用在Cityscapes数据集上训好的deeplabv3以及图像腐蚀+中值滤波在我们自己的无人机数据集上分割出道路,这样复制出的人,自行车一类就可以让他们放在道路上而不是天上或楼上。
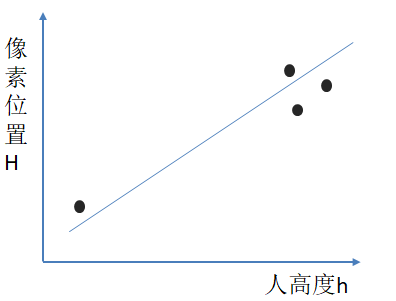
与此同时,由于镜头视角的缘故,在同一张图片中一个人的大小是不同的,直接复制出来填到任意一个地方也是不合理的,于是我们为了解决这个问题,首先在图中找到一个像素h(高度)最矮的一个人,同时再找三个h最高的人,建立一个人的高度h与图片像素位置H的线性关系,这样就可以根据要插入的位置,计算人应有的高度放进去也就不违和了。
multiscale training/test
此方法比较普遍,就不过多介绍了,基本对于任何算法(检测、分割)都可以提升最终的准确率。
mix up
通过将同一batch中的随机两两图片间进行按一定比例线性叠加,同时loss回传也按照此比例回传。论文中表明有用,但在我们的任务上性能并没有提升。
Random Crop | flip | Normalization
随机裁剪为600x600,水平翻转及正则化。
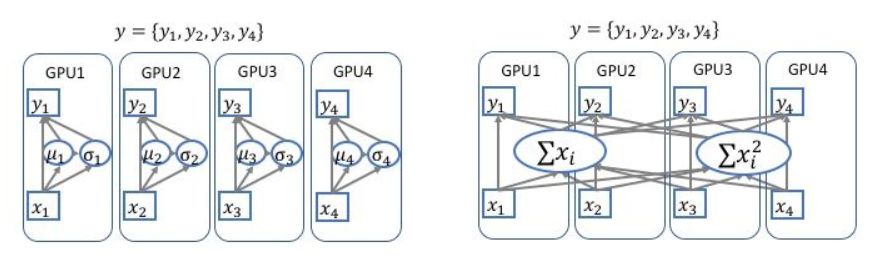
4.sync training
因为用的多卡进行训练,采用同步bn优化收敛过程。效果提升1%
5.nms/soft nms
由于此数据集中重叠物体较多,采用普通nms会将许多TP框去掉,于是采用softnms,缓解此现象的影响。

6. KL-Loss
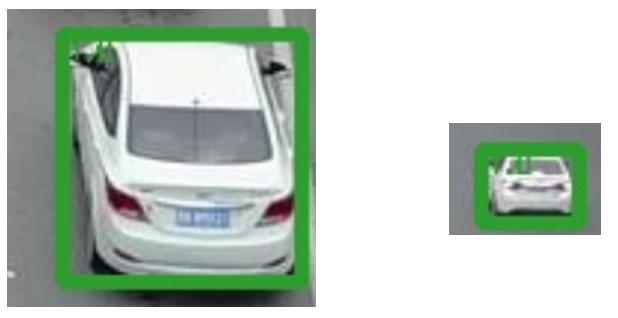
由于视角问题,在同一张图片中,同一类物体的大小可能相距甚远,这会影响训练,那么如何才能减少此影响呢。我们将object的分布假设为正态分布,使用KL-Loss,拉近同类物体之间在特征图上的特征分布。这在没有使用multiscale training / test的时候有1%的提升,但当用了之后便没有效果,可能是与multiscale相冲突了。
Results
在val上mAP为39.4%
Acknowledgement
RRNet是一个采用了再回归思想的two stage anchor-free目标检测算法,通过二阶段回归获得更加精准bbox。欢迎大家在此工作上提出新的意见建议,也希望大家可以把博客网站利用起来,积极分享有用的知识,一起加油😄